
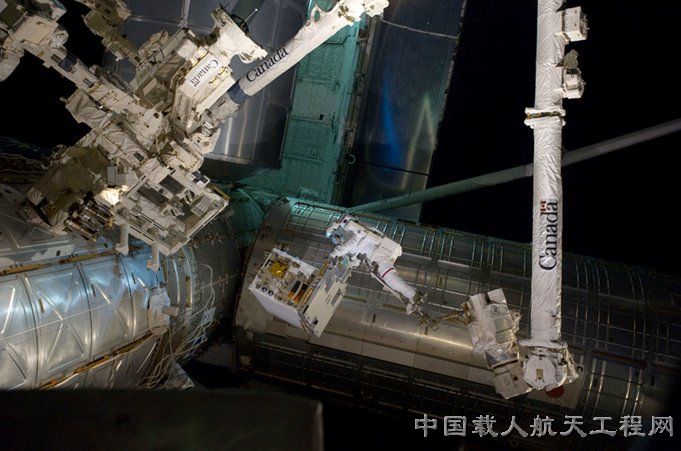
图:2011年7月12日,两名航天员将RRM模块转移到国际空间站(来源:NASA网站)
据NASA网站3月9日报道,3月7日至9日,国际空间站上的航天员实施了一项机器人加注任务,任务由加拿大机械臂和RRM加注模块上的工具完成,标志着卫星服务技术和国际空间站机器人利用技术进入重要里程碑。
此项机器人加注任务由美国国家航空航天局(NASA)与加拿大航天局(CSA)联合实施,是国际空间站上的一项舱外实验,旨在演示验证用机器人为在轨卫星(特别是那些在研制时没考虑到服务维修需求的卫星)提供服务和加注所需的技术、工具和工艺。此次机器人加注技术意味着空间站加拿大机器臂首次用于技术研发,已超越了轨道机器人维修的范畴。
在此次机器人加注任务中,具体完成了气体装置移除、机械臂加注、维修卫星等工作。
国际空间站在机器人加注任务进程中发挥了关键作用。NASA戈达德航天飞行中心的一位官员Frank Cepollina称,机器人加注任务这一事例充分表明,国际空间站是最先进空间技术演示验证的最好试验平台。有了空间站提供的基础设施,机器人加注任务小组可以顺利地在18个月内完成机器人加注任务的策划、设计、开发和空间站飞行演示。由于有国际空间站,新的卫星维修服务技术可以在真实的空间环境中完成演示验证,时间只需几个月而不是几年,这是空间技术的一大进步。
RRM加注模块是由航天飞机于2011年7月发射到国际空间站上的,RRM模块将在轨完成创新性飞行演示,试验、验证和促进针对那些在设计时没有考虑加注和维修需求的卫星进行机器人维修时所需的技术。在以后两年内,RRM模块和加拿大机械臂还将执行若干任务,演示验证多种服务维修能力。
RRM任务的结果将用于降低与卫星维修服务相关的风险,并为未来的机器人服务任务奠定基础。这些未来的任务有可能包括对在轨卫星进行维修和重新定位。
在此次RRM任务中,加拿大航天局的空间机器人机械臂发挥了重要作用。这种机械臂能执行精密的装配维修任务,加拿大航天局编写了软件控制机械臂完成各种操作。加拿大航天局与NASA戈达德和约翰逊航天中心于2012年1月至2月间共同在加拿大对软件进行了测试。
戈达德航天中心为RRM模块开发了四个独特的工具:剪线钳和垫片操作工具,多功能工具,安全帽拆除工具和喷嘴工具,每个工具上都有两个相机,任务控制人员能观察和控制工具。此外,机械臂上也有照相机,供飞行控制人员监测和遥控RRM操作。机械臂能够剪开模拟卫星的外皮,拆掉多个绝缘层,剪掉拧在燃料帽上的电线。而后,机器人将为燃料阀门接通管路,向模拟卫星泵输送模拟液体燃料。(石培新 王岩松 编译)




